C. Premebida1, J. Carreira1,2, J. Batista1 and U. Nunes1
1ISR, DEEC, Univ. of Coimbra. 2UC Berkeley
Paper: pdf (825KB) IEEE, IROS' 14 \cite: bib |
 |
Implementations
Notes:
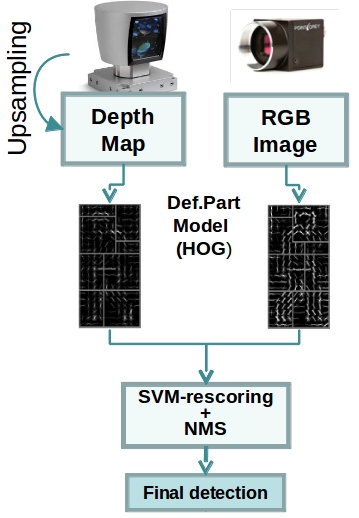
our solution depends on Discriminatively
trained deformable part models
R. B.
Girshick, P. F. Felzenszwalb, and D. McAllester, “Discriminatively
Trained Deformable Part Models, Release 5”
LIBSVM is also necessary libsvm-3.12
README, .m and .cpp (mex) files: download