Research activities and topics
I am researcher at the Institute of Systems and Robotics - University of Coimbra and Assistant Professor at the Dept. of Electrical and Computers Engineering of the University of Coimbra. I received my MsC and PhD degrees in 2002 and 2008, respectively. My main research areas are computer vision, machine learning and computer graphics with special emphasis to geometric problem in non-central projection vision systems. I have scientific publications in the following topics: omnidirectional vision, non-central cameras, optics, camera models, motion estimation, pose estimation, reflections for image rendering, sports vision and legged robotics. I was the Principal Investigator of a closed project funded by the Portuguese Science and Technology Foundation in the area of non-central camera models for computer graphics and computer-aided surgery. I participate regularly as reviewer for some of the most prestigious conferences and journals of the area of computer vision.
 UniProjection
UniProjection
The aim of the project is to study the geometric properties of the projection in non-single viewpoint (NSVP) vision systems composed of curved mirrors and a camera, in the field of computer vision and computer graphics.
Our mission is to achieve a unified projection model for generic systems composed of curved mirrors, lenses or generic reflectors and to develop some applications on fields so different as forward rendering in computer graphics or endoscopy in medical surgery.
 Webpage Classification
Webpage Classification
Automatic classification of webpages using visual features.
To automatically classify web pages, the current systems use the text content of those pages. However, little work has been done on using the visual content of a web page. On this account, we are focused on performing web page classification using only their visual content.
There are several applications: marketing, psychology, emotional and sentiment analysis, advice system to assist in creation of webpages, recommender systems, and others.
 Light Field Cameras
Light Field Cameras
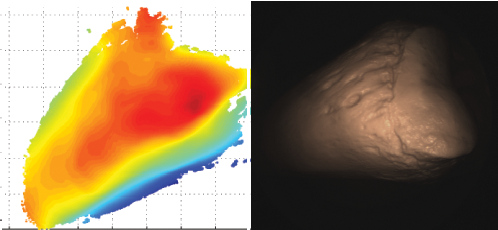
The increasing interest in plenoptic light field cameras is due mainly for the fact that they capture the plenoptic function and then allow for a new multiple view geometry of the light gathered. Additionally they allow post-capture processing that is, particularly for our case, interesting for depth recovery.
We aim to study the depth and shape recovery, particularly for medical surgical scenes and human faces.
 Shape From Shading in Medical Surgery
Shape From Shading in Medical Surgery
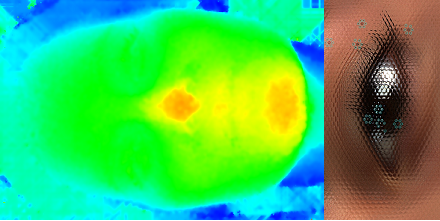
Near-lighting endoscopes are small size self-illuminated cameras that typically have a wide or very wide field of view (FOV), and hence their images are afected by high radial distortion and small spatial resolution in the periphery of the image.
Our aim is to adapt the shape from shading technique to the particular case of near-lighting endoscopes. We propose two improvements to the state of the art methods for PSFS in Near-Lighting Endoscopes. The first contribution is the introduction of the radial distortion model directly in PSFS equations and the second contribution is the compensation of the reduced resolution of the image in its periphery, due to wide FOV.
 SO(10)
SO(10)
Automatic computation of the Yukawa interaction terms for SO(N) groups in orthogonal 2n×2n matrices of rotations in 2n dimensional real space.
We are building a C++ class for the computation of the terms, to be publicly available.
This work is in collaboration with CFTP (Centre for Theoretical Particle Physics) of the Instituto Superior Técnico, of the Technical University of Lisbon.