 |
SIRMA Project
Sistema Inercial para Robótica Móvel Autónoma
|
 |
Inertial System for Mobile Autonomous Vehicles
sponsored by
 Junta Nacional de Investigação Científica
e Tecnológica
Junta Nacional de Investigação Científica
e Tecnológica
 INSTITUTE of SYSTEMS
and ROBOTICS
INSTITUTE of SYSTEMS
and ROBOTICS
Introduction
Project Description
Related Publications
People
INERTIAL SYSTEM FOR MOBILE AUTONOMOUS VEHICLES
Introduction
Modern industrial processes require flexible production methodologies which
include the use of manipulators, AGV's and mobile robots. Currently it
is easy to find industrial processes with AGV's and mobile robots based
on systems that execute sequences of operations previously programmed and
with limited interaction with the environment. This type of approach has
high engineering costs and restricts the employment of mobile robots to
environments with know geometry. These drawbacks can be overcome if both
the manipulators or the mobile robots use sensors to adapt and correct
the movement of the vehicle.
The use of sensors permits obstacle avoidance as well as trajectory
execution in environment with unknown 3D geometry. With sensorial information
it is possible to improve the execution of the current tasks, and the development
of new applications. These new applications can include surveillance, aid
for disable people and execution of tasks in hostile or difficult environments.
These applications, to be performed autonomously, imply the use of sensors
for a correct execution of the trajectories and/or the correct localization
of the robot in the environment. With the information provided by inertial
sensors (accelerometers and gyrometers) is possible to develop inertial
navigation systems useful for these systems. Inertial navigation systems
are self-contained, nonradiating, nonjammable systems which provide dynamic
information through direct measurements within the vehicle and useful for
navigation in indoors or outdoors environments. With the advance of new
technologies for this sensors and the decreasing of their, it is possible
to develop a low-cost inertial navigation system for navigation, and localization.
This system is useful for mobile robots and applications based on measurements
of velocity and/or acceleration.
Project Description
We propose the development of an inertial system to integrate in the navigation
module of a mobile robot. However the project can be useful in other domains
and applications based on measurements of velocity and/or acceleration.
The project will be developed around the following different blocks:
-
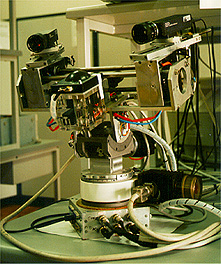
Development of the mechanical structure for the inertial system;
-
Development of electronic board to measure and process the information
provided by the sensors to obtain the position and velocity of the body
carrying the inertial system;
-
Development of software modules to calibrate the system and compute the
body's velocity and position;
-
Tests to check the operationally of the system will be performed at the
end of the project.
Related Publications
-
J. Lobo, P. Lucas, J. Dias, A. de Almeida, "Inertial
Navigation System for Mobile Land Vehicles", IEEE International
Conference on Industrial Electronics - ISIE'95, Athens, Greece, 10-14 July,
1995
-
J. Lobo, J. Dias, "Inertial Information on Artificial Vision and
Mobile Robots", 30th International Symposium on Automative Technology
and Automation, Dedicated Conference on Robotics, Motion & Machine
Vision, Florence, Italy, 16th-19th June, 1997.
-
J. Lobo, J. Dias, "Integration of Inertial Information with Vision
towards Robot Autonomy", ISIE'97 - IEEE International Symposium
on Industrial Electronics, Guimaraes, Portugal, 7th-11th July, 1997.
People
Jorge Dias
Jorge Lobo
This Page is maintained by Jorge
Lobo
Last modified on Sunday, 16-May-97
You are invited to SEND your
Comments & Suggestions